TALOS
An edge-deployed bicycle advanced safety system. Utilizing custom computer vision models to detect and isolate threats in high-speed transit areas.

Edge Compute. Zero Compromise.
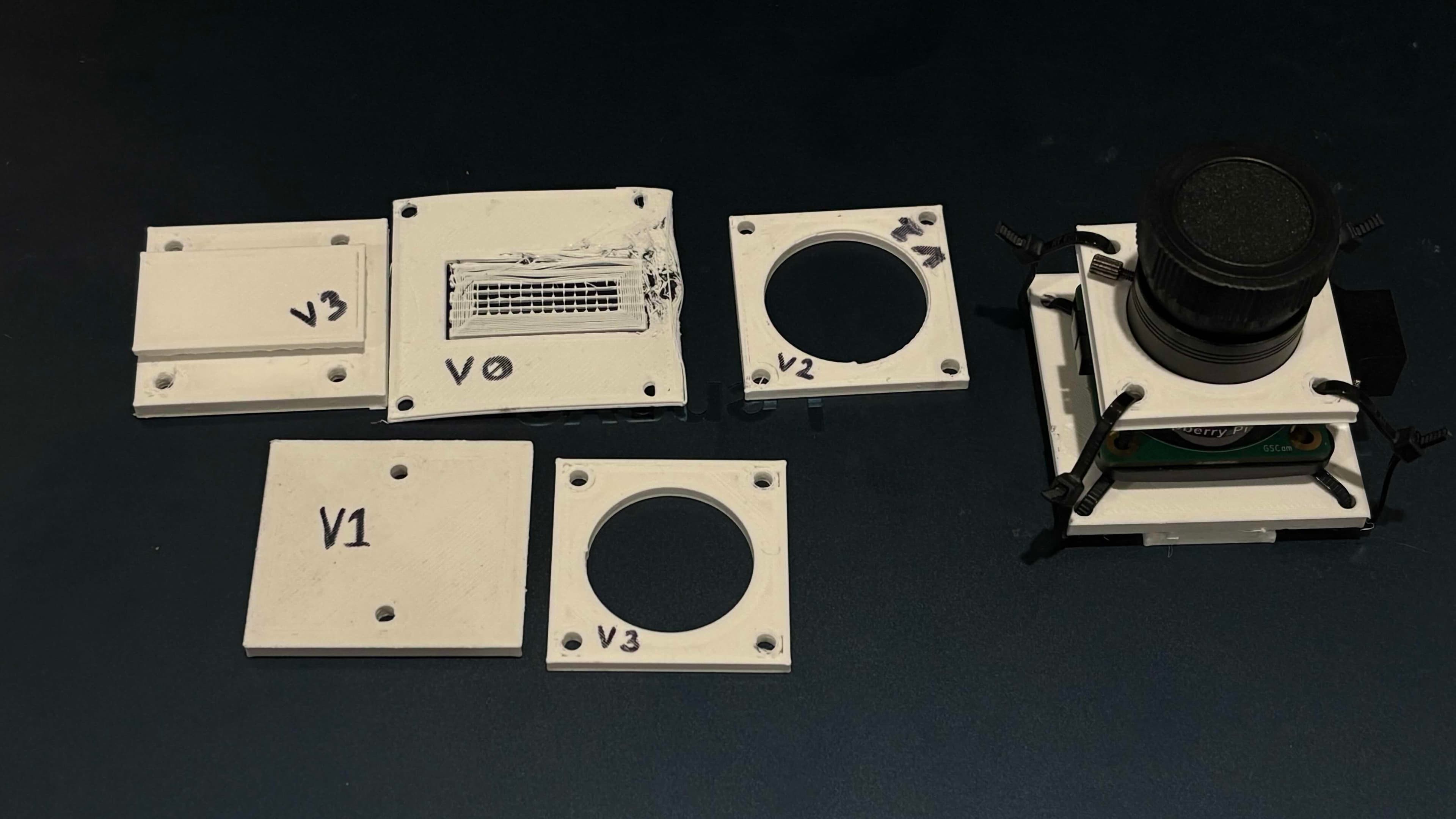
The physical enclosure houses a Raspberry Pi 5 tightly integrated with a Hailo-8L Neural Processing Unit via an M.2 HAT+. This combination provides dedicated compute strictly for the computer vision pipeline, allowing high-frame-rate edge inference without thermal throttling on the bike.
Rapid Prototyping.
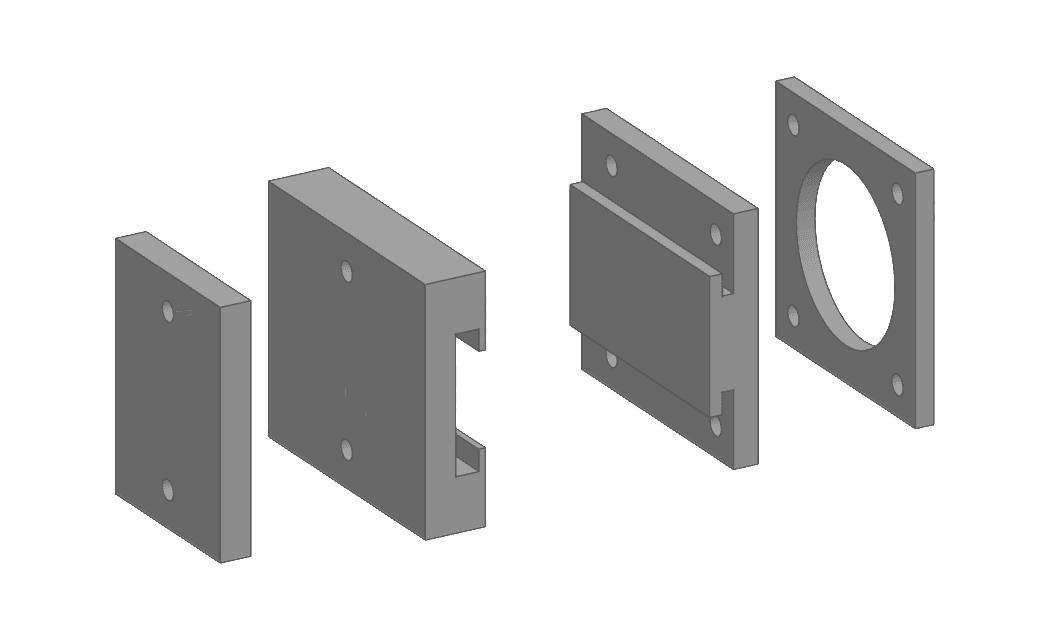
The custom mounting solution was rapidly iterated and 3D printed to securely attach the compute module directly to the bicycle frame. This allowed for real-world telemetry and environmental testing without risking the hardware.
Trained for High-Speed Transit.
We utilize a custom-trained YOLOv8n object detection model. Through rigorous dataset fine-tuning and data augmentation targeting high-speed transit scenarios, we achieved a massive improvement in detecting critical targets.
Understanding Intent.
Detection is not enough. TALOS implements a threat-isolation algorithm based on Tau Theory (Time-to-Collision). By calculating the expansion rate of bounding boxes across consecutive frames, it predicts transit threats traveling at high velocity before they enter the cyclist's critical zone.

Recognized Innovation.
TALOS was selected as a Helset Scholar Finalist at the prestigious Stanford Bay Honors Symposium for its innovative approach to applying edge AI to micro-mobility safety, alongside awards at four other engineering symposia.